Nautilus OET
Realtime Underwater Mapping and Immersion
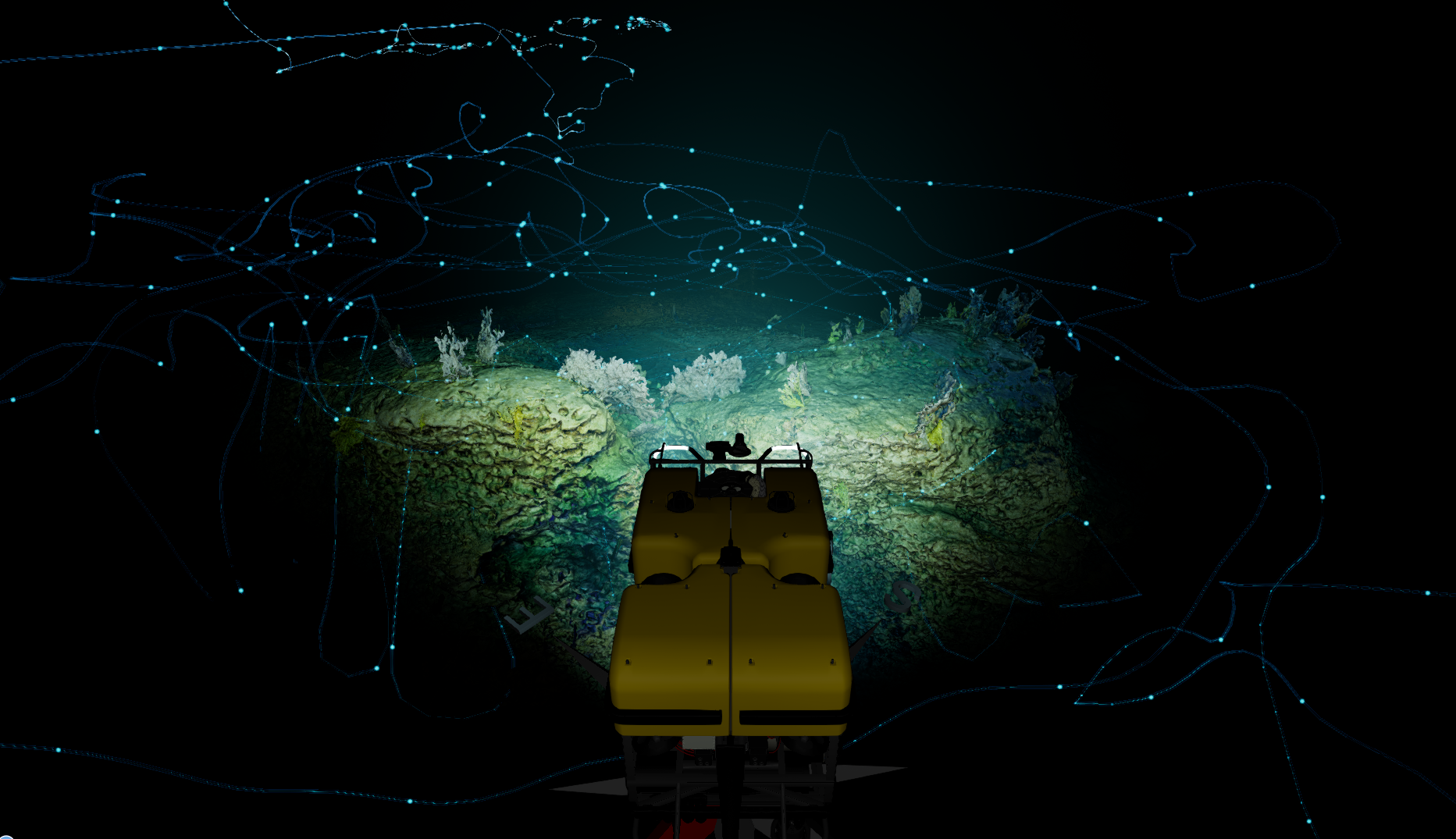
RUMI is an exiting new project. RUMI aims to take data collected during expeditions and use it to create a true-to-life, scientifically accurate simulation of the ocean floor.
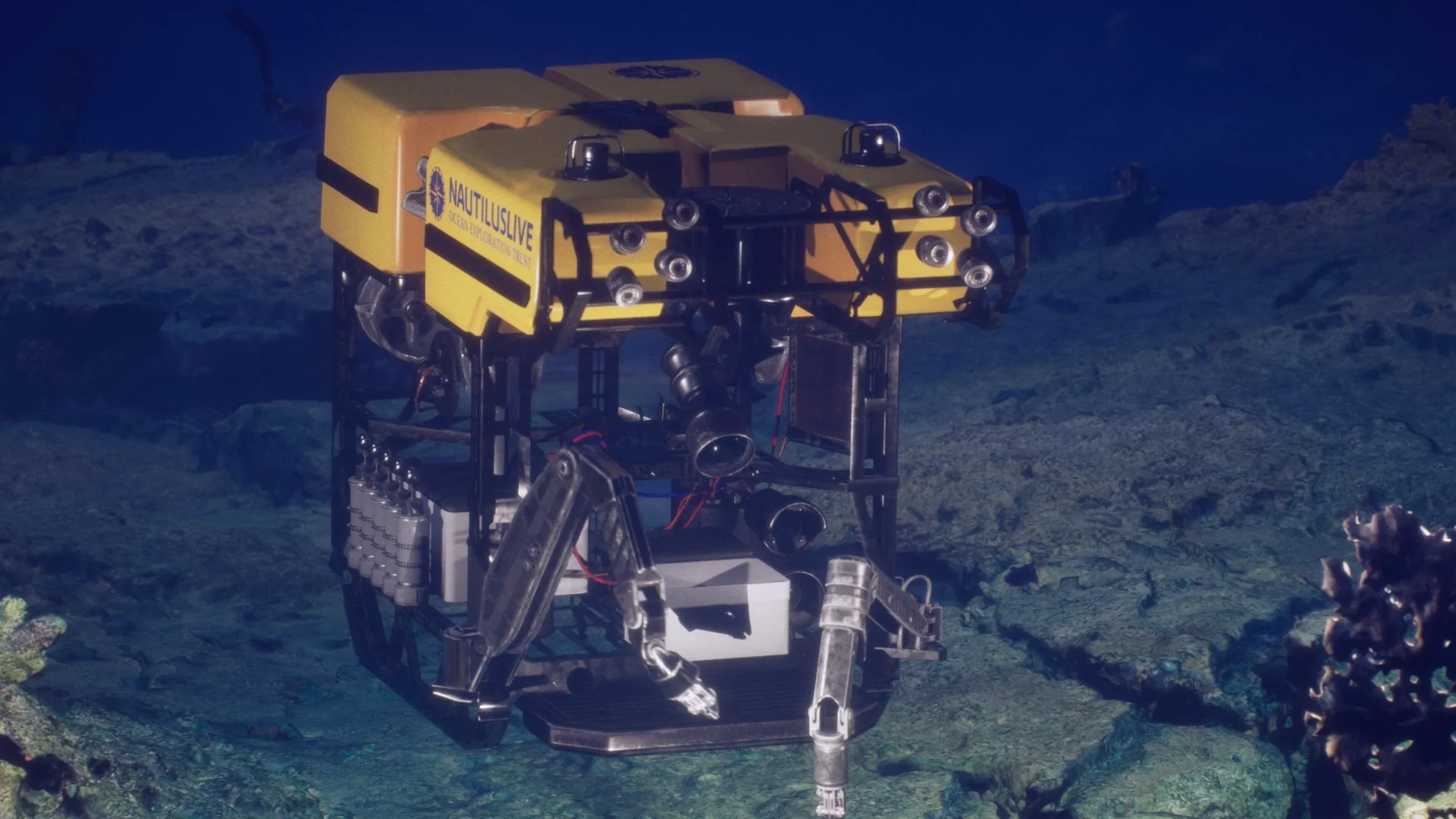
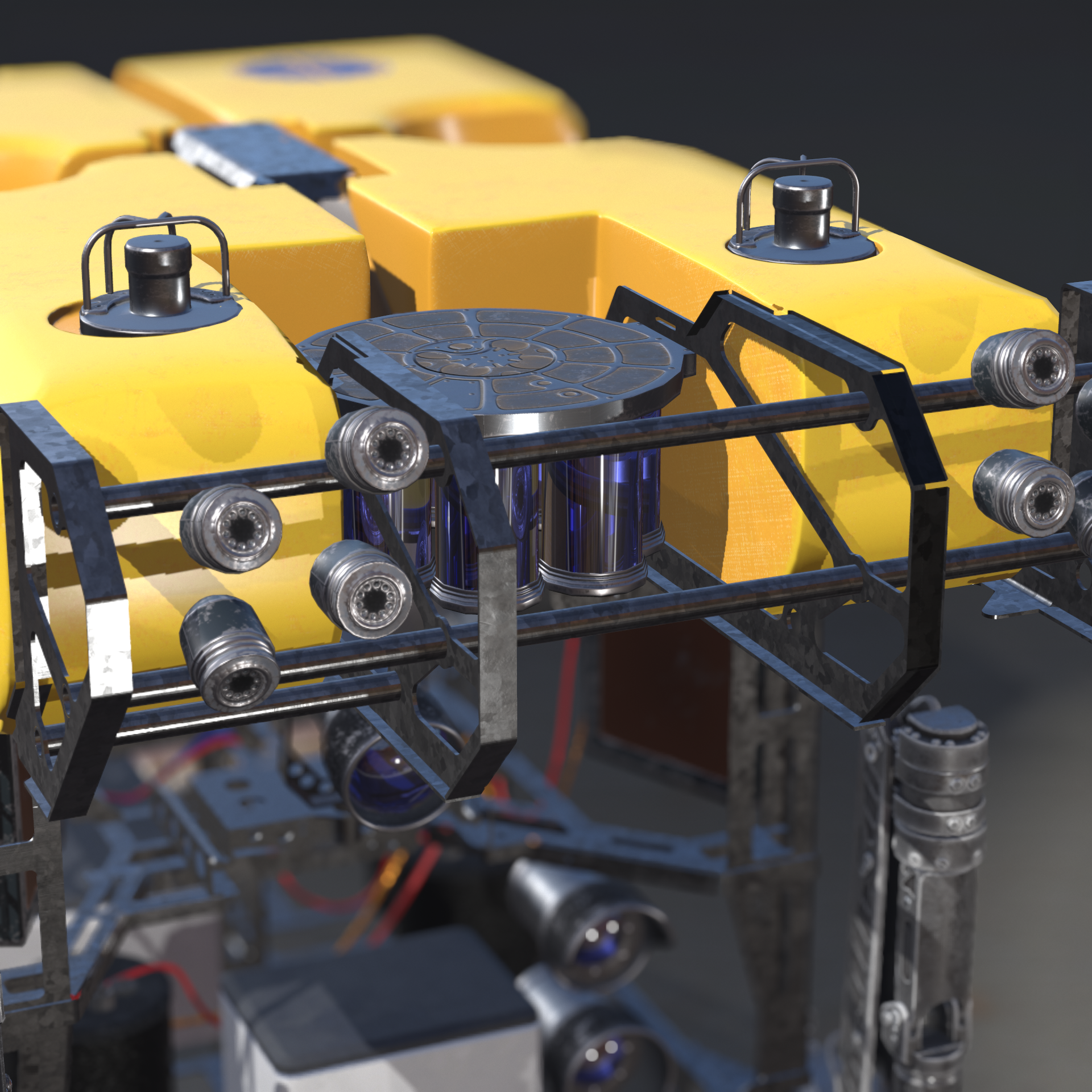
ROV Hercules Model
A key part of the RUMI experiance is my hand-modeled recration of ROV hercules





Overview
Watch the video below for a short overview of RUMI 1.0 features
Technical Brief
Data sources
Exploration Vessel Nautilus collects multiple kinds of data on her expeditions, such as LiDAR and sonar. The ROV Hercules also collects data. The most important for us is high resolution video.
Simulator capabilities
Currently the RUMI simulation can display LiDAR, Multibeam, and photogrammetry data in geospatially accurate contexts. The simulation is globe scale, giving context to the size of features being explored.
Time and location data from the ROV are also recorded and played back in the simulation. The user can view a picture-in-picture experience and compare the 3D world of the simulator with the video footage recorded by the ROV, complete with audio commentary from the crew.